Automated Cat Feeder System
Final Project, Mechatronics and Dynamic Systems
Snapshot Overview
Project Dates: January 2023 through May 2023
Technical Skills Used:
-
Circuit Design & Analysis
-
Arduino Programming
-
Pneumatic System Design
-
Sensor Integration
-
Computer Aided Design
-
Additive Manufacturing
Project Outcome(s):
-
Successful development of a automated cat feeding system using limited resources.
As the final project for my Mechatronics and Dynamic Systems course at New Mexico Tech (NMT), I was tasked with designing and assembling a mechatronics system using the components provided in the course's lab kit.
The major components included in the kits are listed below:
-
Arduino Mega 2560
-
(5) LEDs
-
Ultrasonic Sensor
-
IR Sensor
-
Color Sensor
-
DC Motor with Encoder
-
H-Bridge Motor Driver
-
Pneumatic Cylinder
-
Air pump
-
(2) Solenoid Valves
-
PVC Tubing
-
(3) Relays
We were challenged to design our project around the available components as a way of encouraging us as students to be creative with limited resources. The minimum requirement was that we used at least one actuator and two different kinds of sensors in our final assembly. Of the list above, I choose to use all of the available components except for the IR sensor.
I chose to design and build a prototype automated cat feeder with an automated refill light. The system was designed with two distinct sub-systems, the feeding system and the monitoring system.
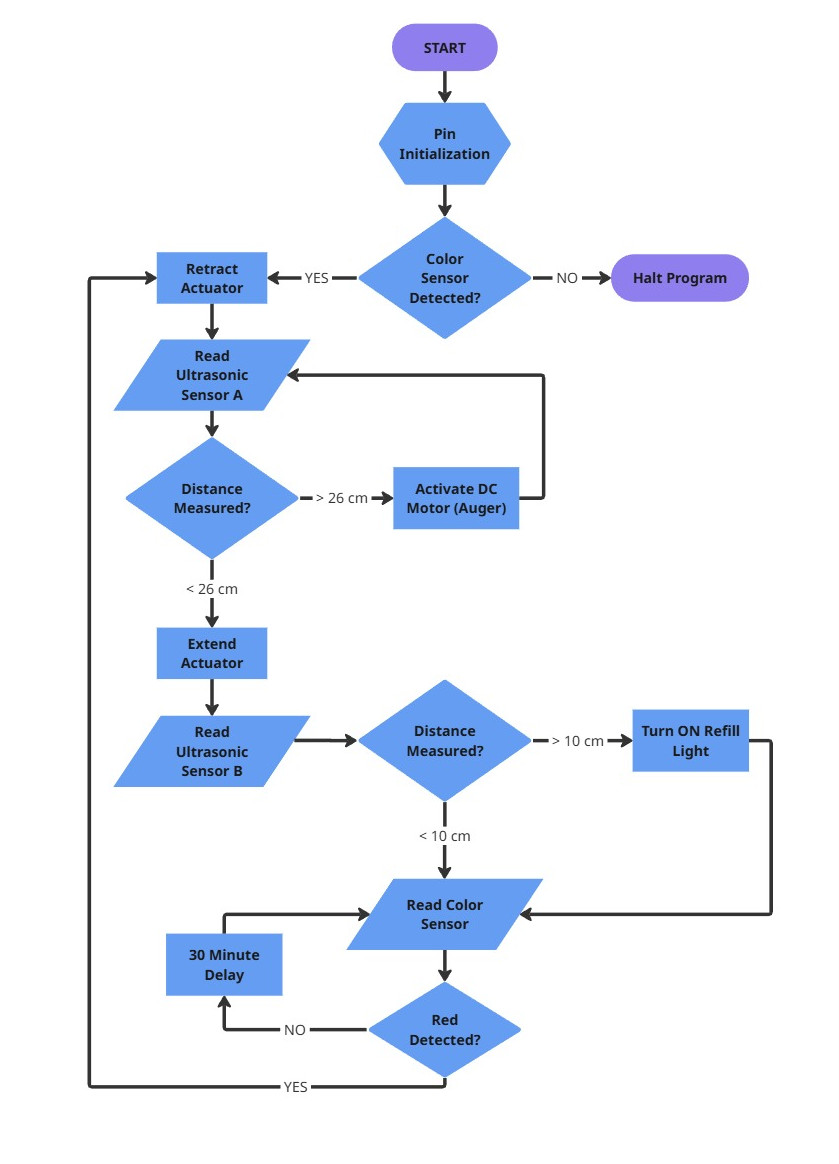
The purpose of the feeding system is to ensure that the food bowl is never empty, while also minimizing movement over long periods of time. To achieve this purpose, the feeding system only retracts the food bowl to re-fill the bowl when the bottom of the bowl is visible. I was able to automate this portion of the system by using the color sensor provided to me and calibrating its values to recognize the color red, which is present at the bottom of the food bowl. Once the system recognized that a portion of the bottom of the food bowl was visible, it would retract the food bowl, using the pneumatic linear actuator and began the filling process. In order to not overfill the food bowl during the filling process, I used an ultrasonic distance sensor mounted on the ceiling of the housing. As long as the ultrasonic sensor has not reached its threshold, the filling process triggers a DC-motor driven auger system through a pipe. Once the ultrasonic sensor would reach its set threshold, it would terminate the filling process and continue the program.
This is where the monitoring subsystem comes into play in my automated cat feeder. The purpose of the monitoring system is to ensure that the user is notified when the reservoir holding the food has reached one third of its capacity. I determined the current level of the food available in the reservoir by using a second ultrasonic sensor. This sensor would trigger a refill light when it detects a distance larger than the maximum distance found during my calibrations. This is meant to simulate a notification to the user, similar to sending a push notification to your phone. I did not have the hardware or software needed in order to set up a more sophisticated notification system than the LED, but I have thought about recreating this project with that component being one of the major improvements.
I had a blast in automating the system, which really reinforced to me that automation in some shape or form will the path forward for me in life.
Aside from the automation muscles that I was allowed to exercise when designing and assembling my system, I had the opportunity to build upon my computer aided design (CAD) skills. Prior to completing this project, I had done a considerable amount of CAD modeling for 3D printing, but I had not had the opportunity to work much with patterns in my CAD modeling. In designing the auger for my feeding sub-system, I was able to learn and practice using circular patterns in 3D modeling. This skill has come in handy in quite a few aspects of my schooling and research since completing the project.
I did a lot of research into the various 3D printing materials and which could be used in contact with food. In the end, I decided upon a PLA printed auger, as PLA for the short period of testing I conducted on the system. If I were to recreate the project, I would seal the print with food-safe epoxy coating. Either way, the auger worked very well during testing and was able to transport the food from the reservoir into the food bowl.


